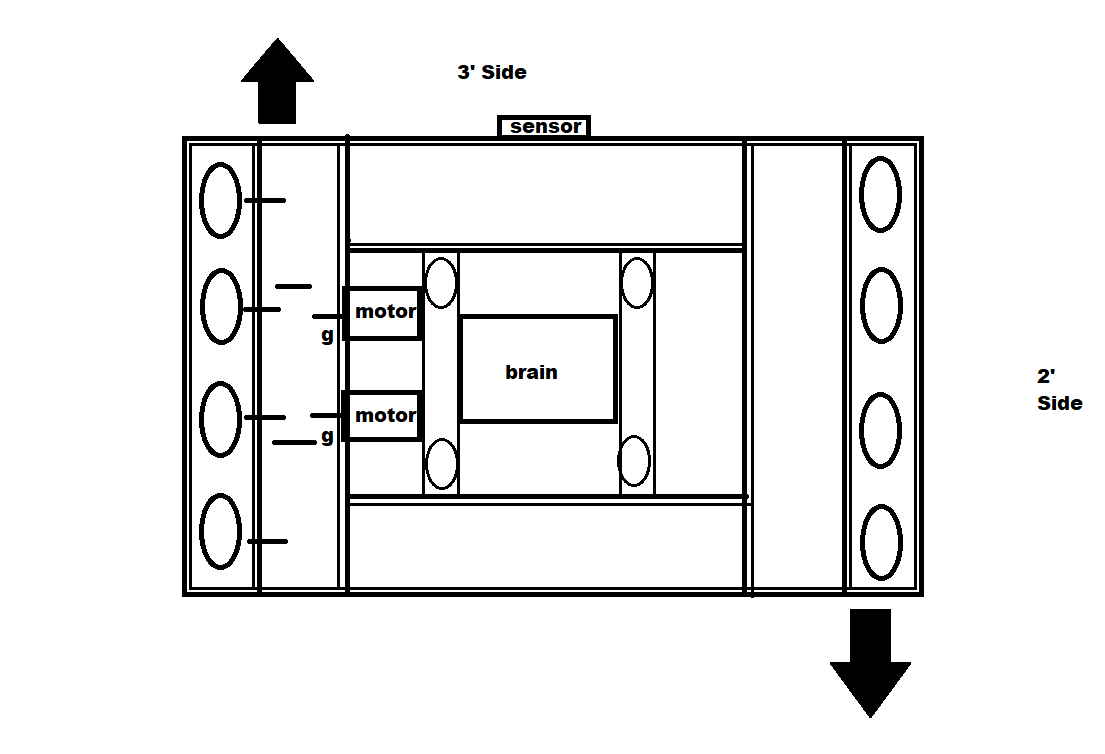
Hi @CSU_BEAST_XLR8, everything that @Doug_Scott has mentioned would be extremely helpful for the build. Using the high strength shafts, bearings, and high strength gears will make it possible for us to move such a considerable amount of weight. Utilizing multiple motors as well as multiple wheels per side would be great in order to distribute the weight you plan to transport. I have quickly drawn up what a potential design could look like, with the specific design criteria mentioned taken into account. You’ll see that a 2’x3’ bot is possible, utilizing multiple structural pieces (drawn with a double solid line), four omni-wheels powered by a gear train that will be geared down (horizontal lines, some denoted “g”) from our two motors, per side.
Set up in this configuration, the two
V5 Smart Motors (11W) per side would be geared down enough (when using the red 100rpm insert) to move that side either forward, or reverse, such as Doug is mentioning with tank drive. Utilizing the omni wheels (ovals in drawing) will allow for your bot to have a tight turning radius, with the specific point of turning located directly center with the brain. An additional 4 wheels located closer to the brain will help reduce the sag experienced by holding such a weight. Also with most of your electronics located in the center of the chassis, I’m sure waterproofing options would be very easy since everything is located very close together maximizing efficiency.
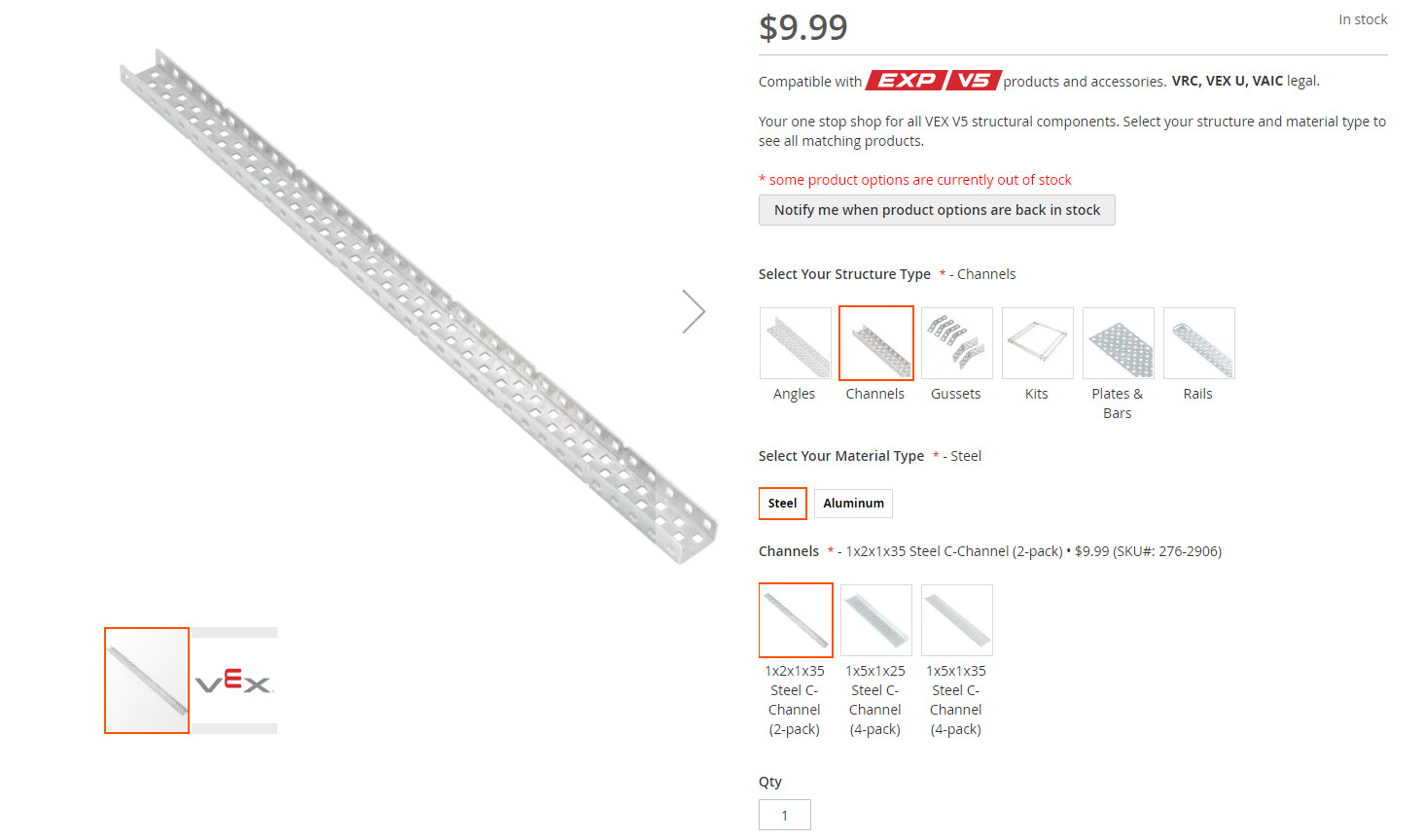
Some things I would recommend to complete a bot like this include the high strength shafts as well as bearings, the VEX V5 System Bundle which will allow you access to the motors, brain, battery, and wires to make your bot come to life, I would recommend using steel channels mostly and other VEX structure pieces as they will strengthen and be the backbone for the chassis.
Now, in order to mount the high strength shafts with these metal pieces, you’ll need to perform some cutting so I recommend using a step drill bit
like this one. This will allow you to incrementally increase the size of the holes on the structure pieces, and will allow you to fit a high strength shaft through and securely mount it.
I’ll continue to generate further assistance, but let me know what you think of my preliminary design and placements. And I also do want to apologize for my delay in response. Let me know if there is anything else I can look into!

{kind=link}