My basebot build has one wheel not turning. What can I do to fix this?
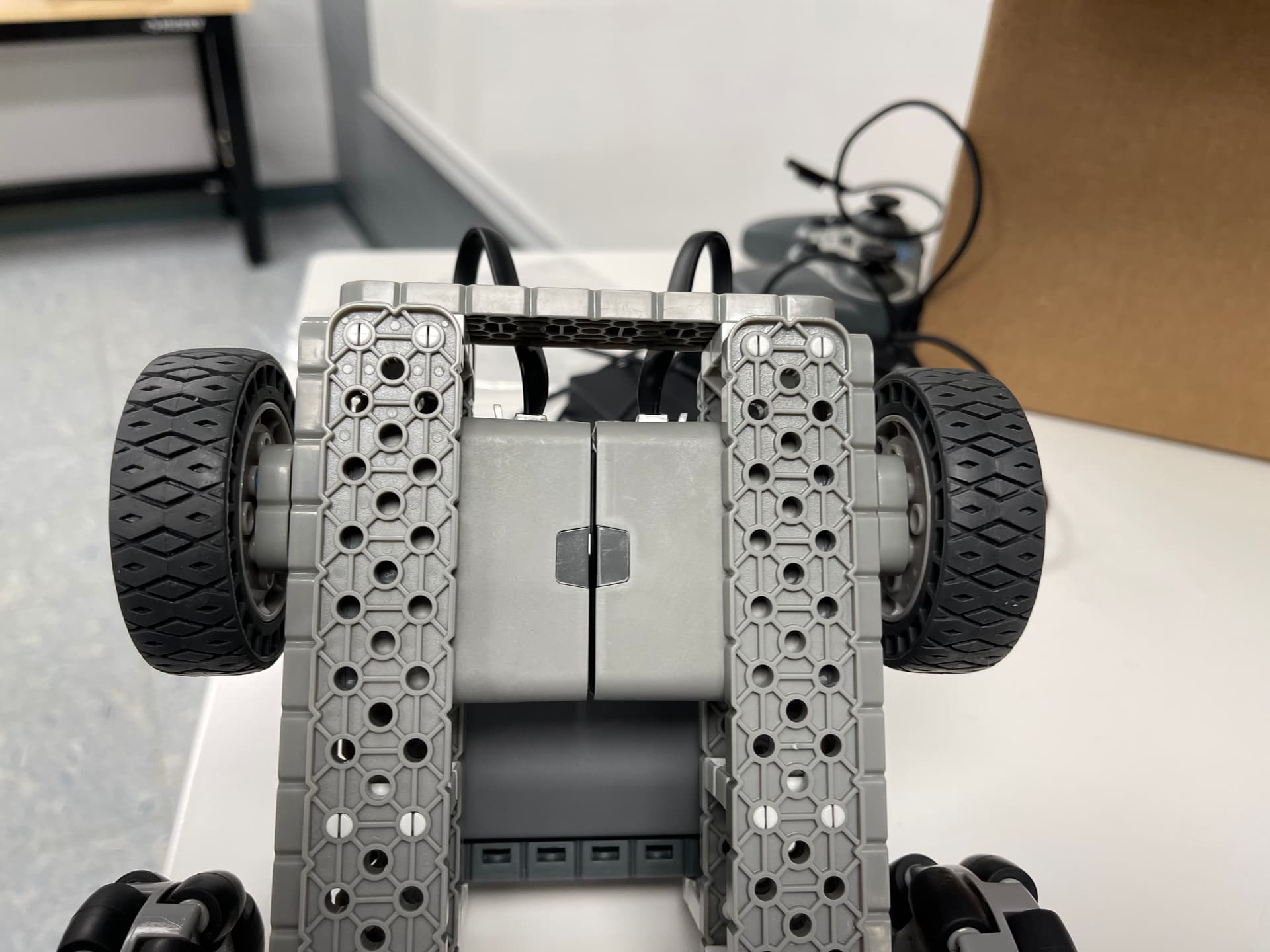
Hi @Brandy_Horton, and welcome to the community! There are a number of things you can do to correct this issue. Firstly, let’s take a look at the physical build. Are you able to provide pictures of your BaseBot so we can better help rectify the issue?
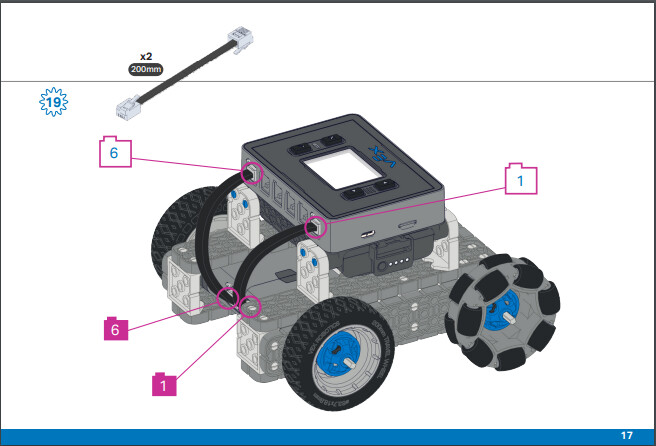
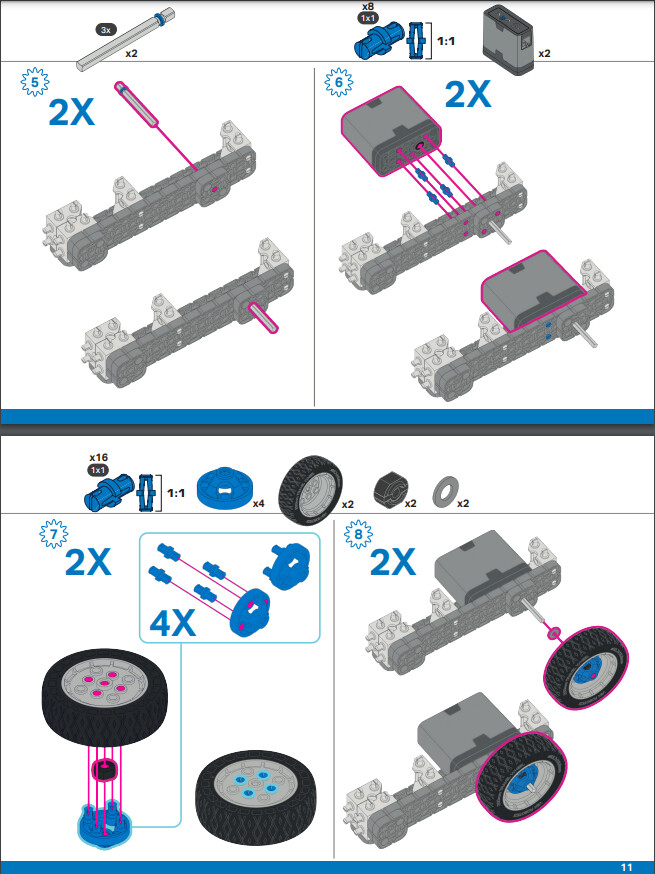
- Ensure the drive shaft fully inserts into the motor. I’ve attached an image of the Build Instructions showing this procedure. When all is said and done, you should be able to hear and feel the motor engaging when the wheel is turned. Please see this video of me turning my BaseBot wheel, where the motor is clearly heard. If you are able to hear the motor engage when the wheel is turned, that is good news! Move onto step 2. If you are unable to hear/feel it, please double check the shaft is inserted into the motor.
- Ensure the motor is correctly plugged into the corresponding IQ Brain ports. Again in the Build Instructions, it details plugging the motor into two different ports on the Brain. Please double check that the wire is fully inserted (until the tab clicks into place) for each motor, for each port. If your wires are in the correct ports and are fully inserted, please see step 3.
- Now, we’ll dive into the “coding” aspect of the troubleshooting steps. Which generation of IQ are you using, IQ 1st Generation or IQ 2nd Generation? Are you using VEXcode IQ to program? Or are you just using the Driver Control Program? Does the motor work with the IQ Driver Control Program? Please see this article from the VEX Library, for more information on how to find and use the Driver Control Program. If the wheel is turning when using this program, you may have to double check the device configuration you are using in VEXcode IQ.
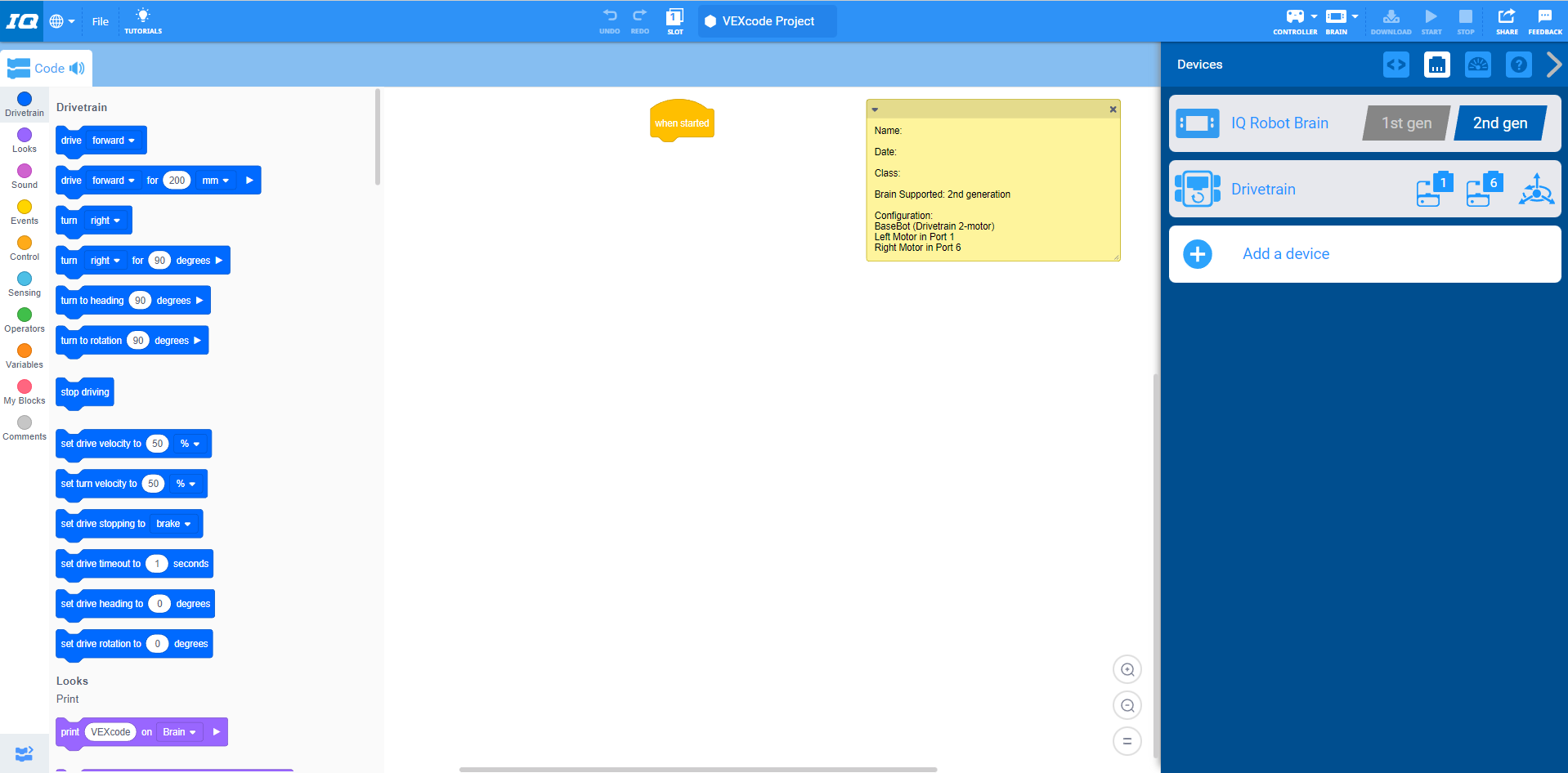
- Upon opening the BaseBot template in VEXcode IQ, when I select the Devices tab, I can see there is a device already configured, utilizing the same ports as prescribed to me from the build instructions. If you configured your own device, did you correctly select which ports your motors are plugged into? Would you be able to provide images of your configuration?
Again, images/videos of your robot would be very helpful to us, in order to help you better. I hope you find all this information useful in troubleshooting this issue!
3 Likes



Hi @Brandy_Horton! Thank you for sharing these images! Are you trying to run the built in Driver Control program, or your own code that you created and download to the robot?
built in
@Brandy_Horton got it, thanks ![]()
When you spin the wheels manually be hand when the robot is off, can you hear both motors engaging? Or is one of the wheels quiet when you turn it?
The reason I ask is i’m wondering if the shafts are pushed all the way into the motors.
both will spin with the noise
@Brandy_Horton that’s good news! ![]() Next, could you check the Devices Screen to ensure both motors are reporting? This is also to ensure the cables are pressed in all the way.
Next, could you check the Devices Screen to ensure both motors are reporting? This is also to ensure the cables are pressed in all the way.
Here is an article on how to do so.
I would also suggest watching these two videos from our Introduction to VEX IQ (2nd gen) Training Course to see if you have a specific driver configuration with your Controller that maybe everything is being controlled by one joystick:
Please let me know if this information helps!
