Hey all. It’s me again. I’m sorry for the 1000 questions.
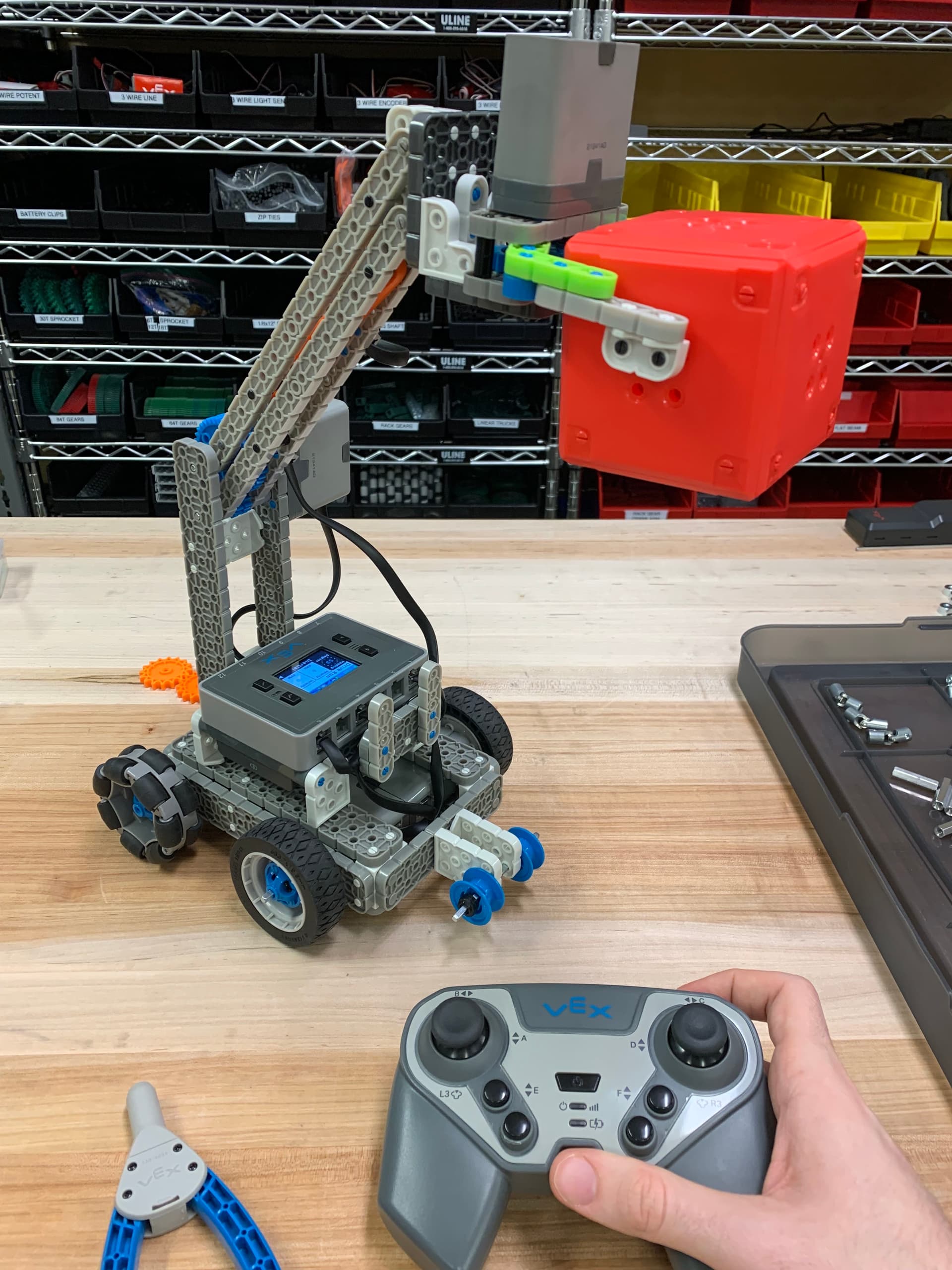
The clawbot seems extremely unstable. I will admit we jumped ahead to the clawbot to do a demo at our 8th grade basketball night. So we built 2 clawbots. Whenever we pick up a block or turn too fast or stop too soon (our velocity is at 50%), the thing wants to tip over. We added two cubes to the back of the unit (see the picture attached) as a fix. Is this an issue that we just have to be creative in fixing or is there a known fix?
I’ve been through most of the Facilitation Guides (skimmed them, to be honest) that dealt with the clawbots and couldn’t see any pointers. Us creating our own unique fix is ok but I just wanted to make sure.
Thanks!
Hi @Barry_Carter_II, we’re here for you so no need to apologize!
The Clawbot was designed as a starting point to build a robot with the IQ 2nd gen system. Basically this means, as you stated, you “just have to be creative in fixing.” The reason for this is to allow newer users to immediately find improvement points on the robot, which is already the first step in the Engineering Design Process. So, way to go modifying the Clawbot to increase stability!
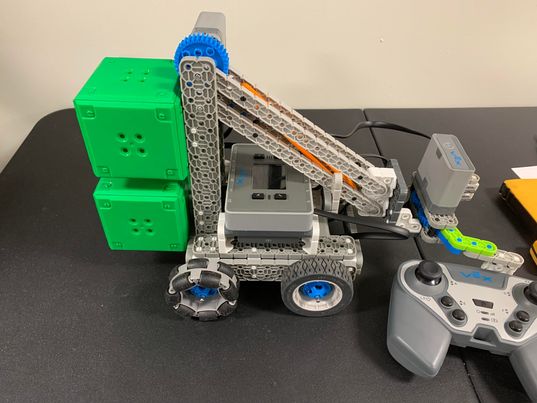
Check out some of the simple modifications we made, the first piggybacks off of your use of the IQ Cubes. I popped the top and added weight inside, this design is really cool as you can tweak how much you want your robot to be counterbalanced during play.
Next, we added another axle to the front of the robot in addition to makeshift wheels, to prevent tipping when coming to a stop. The next modification I’d want to make is reinforcing the arm tower, to prevent sway when turning at height.
What other modifications do you think can be fashioned out of IQ pieces? If you’re looking to create something specific (more stable drivretrain, more stable arm) please let me know and I can work with you and CAD to create some more 3D build instructions!
Thanks for the help. We examined the cube and thought we could take it apart. Was going to try Monday. I agree on the stabilization of the arm when fully lifted. I have a couple really smart “nerds” (we pride ourselves on being nerds and wear our badges proudly in my class  ) who I’ll put on it. I’m loving the Vex program in general and the accessibility to all of you all! I’m glad we choose the Vex products!
) who I’ll put on it. I’m loving the Vex program in general and the accessibility to all of you all! I’m glad we choose the Vex products!
3 Likes