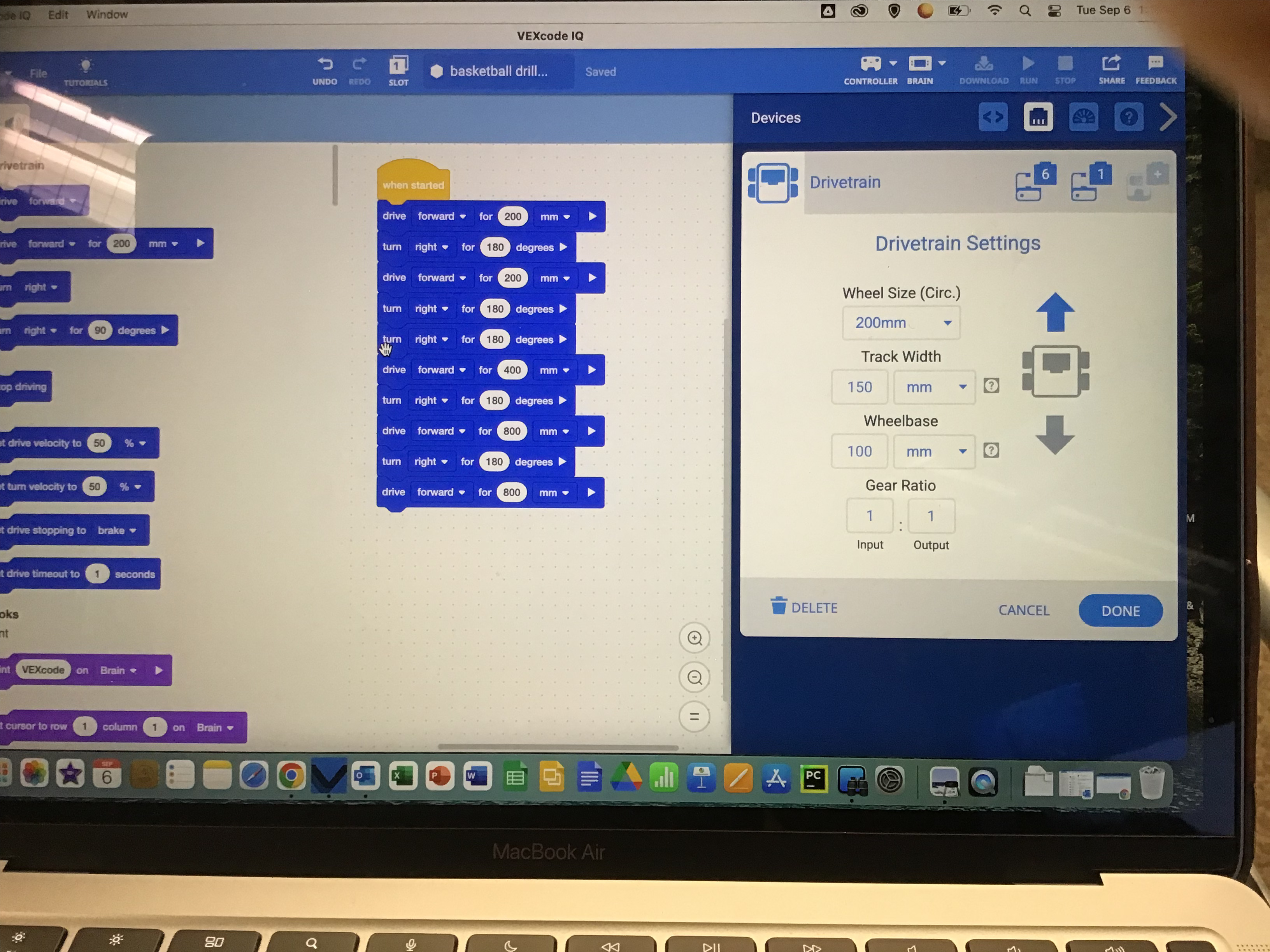
I measured the Track Width as 150 MM and the Wheel Base as 100 MM. Again my turns are no where near correct. The wheel size is 200MM.
We are ONLY using the base bots at this moment that is the standard robot. I cannot find anywhere online what to use for the track width or wheel base. This is the best website that I have found so far and again what I measured isn’t working: https://kb.vex.com/hc/en-us/articles/360057008811-Finding-Your-Robot-s-Track-Width-and-Wheelbase
Any other location I can find what the standard numbers are for the Basebot???
Hi Christopher!
Can you send me a picture of what robot you’re using? And if you are using a 1st gen or 2nd gen brain.
You also can use the templates to have everything pre-set and configured for you if you want to go that route. https://kb.vex.com/hc/en-us/articles/4403663392788-Using-VEXcode-IQ-Blocks-Example-Projects-and-Templates
Thanks
I have attached multiple pictures. Pic 1 shows I am using the Gen 2 vex IQ robot
Pic 2 shows my basketball drills challenge with 180 degree turns and the given wheel base and track shown.
Pic 3 is a video showing that it is doing way more than 180 degree turns.
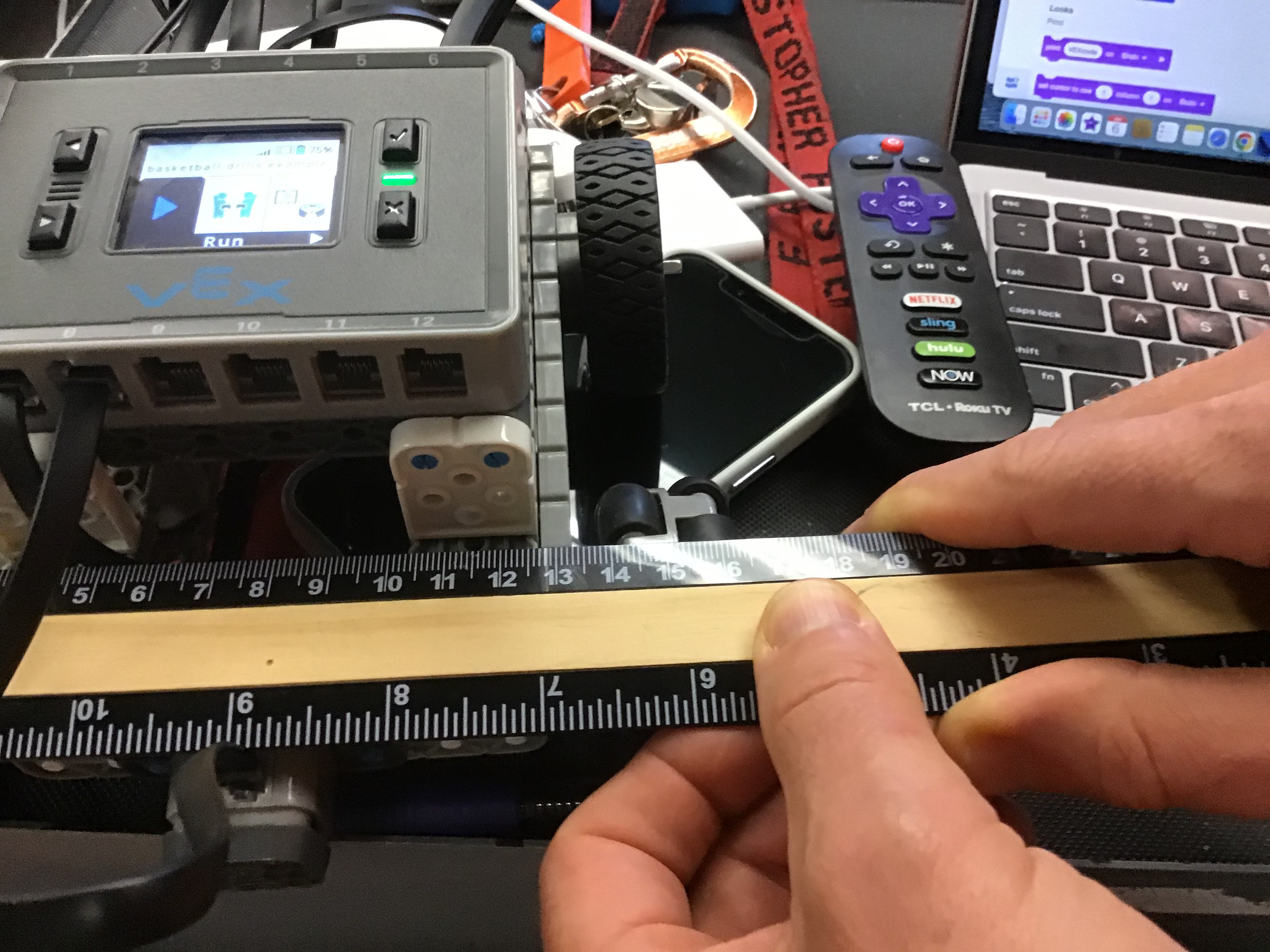
Pic 4 is the wheel base showing 10cm following the directions I gave in the above website in the previous message. 10cm translates to 100mm.
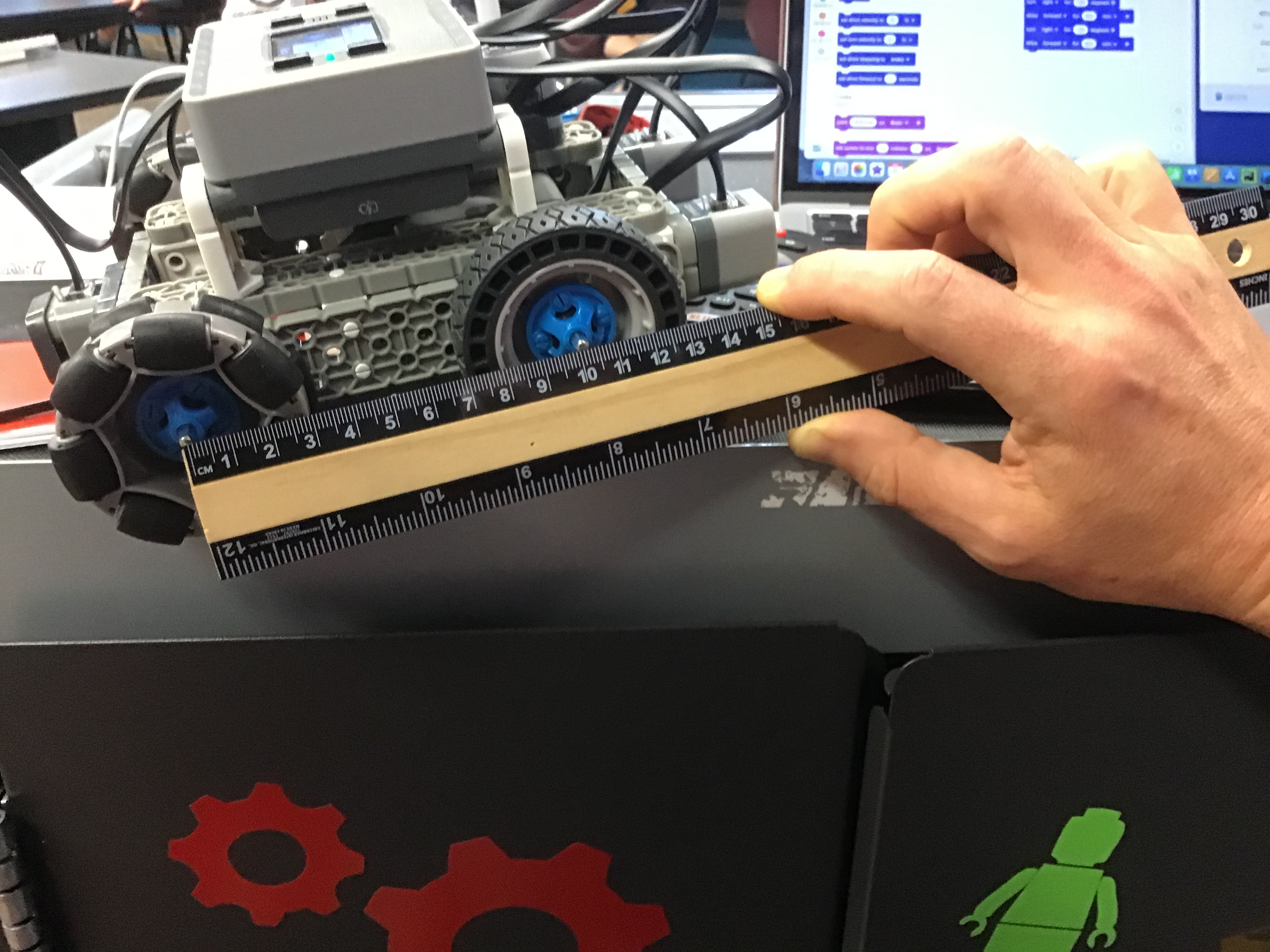
Pic 5 is the track showing 15cm following directions i found in the above website in the previous message. 15 cm translates to 150mm. Both of which you can see is how it is set in pic 2.
Oh I see. There is a simple solution here that will help! Because you are using a gen 2 Brain, it has a built-in inertial sensor. This removes the requirement for the track width and wheel base measurements.
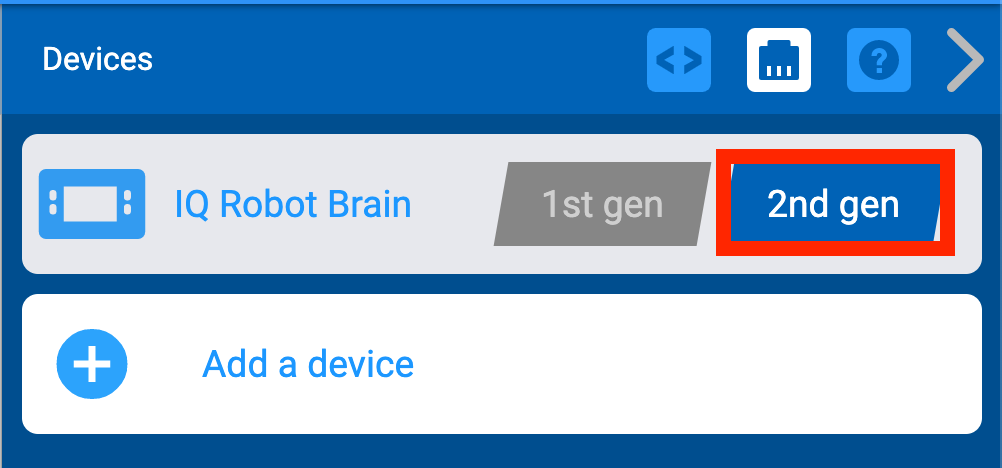
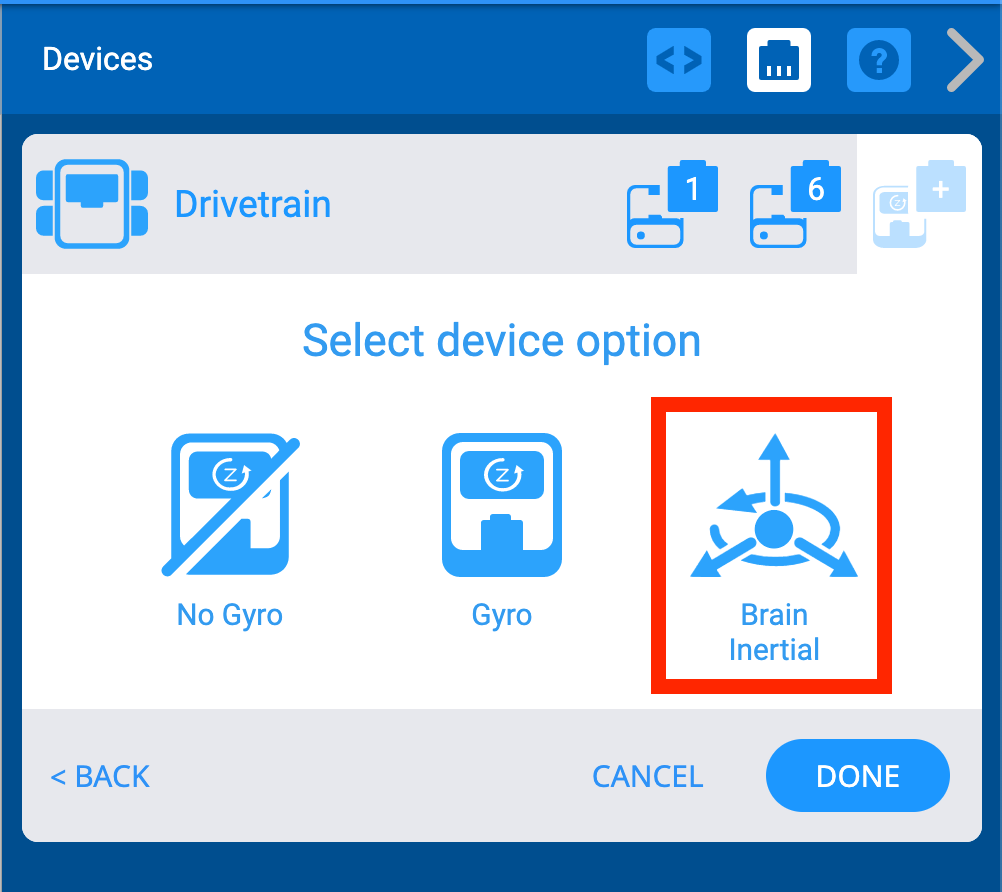
First thing is to check that you have 2nd gen selected before adding a device.
Then when it gets to asking about gyro/no gyro/inertial, you can select the Brain Inertial sensor.
There’s more information about the Inertial Sensor built-in to the Brain in this article: https://kb.vex.com/hc/en-us/articles/4409666542100-Understanding-Inertial-Sensor-Data-from-the-VEX-IQ-2nd-gen-Brain
Let me know if this works!
2 Likes
Hey Alaina - You are a lifesaver… That worked. Thank you!!!
I was hoping kids could start this today. But we are ON IT tomorrow. Thanks again… Chris
3 Likes
Happy to help!! I’d love to see updates on how they do tomorrow 
1 Like
I am following this post because we had some of the same issues last spring. I thought the issues were because of friction or lack of friction with the omni wheels that influenced the turn. The good thing is that I found out my student knew what a 90 and 180 degree angle should look like and they quickly pointed out that the robot was either turning too little or too much for the angle. At least they knew basic geometry!! Curious to see if the change helped.
1 Like
When you use the Brain Inertial Sensor (or Gyro Sensor in the case of 1st Generation), then the robot will turn until it physically reaches the angle that you asked it to turn to. In this case, if the wheels slip or the robot gets bumped whilst turning, it doesn’t matter. It’ll continue to turn until the Intertial (or gyro) returns the desired value,
If you aren’t using the Inertial or Gyro, the track is used. Then the robot will spin the wheels a calculated amount to attempt to turn the robot through the correct angle. However, the robot doesn’t have any way to know if it did this accurately or not. If the wheels slip on the surface or the robot gets knocked in the turn, it will still only spin the wheels the calculated amount and can’t correct the error.
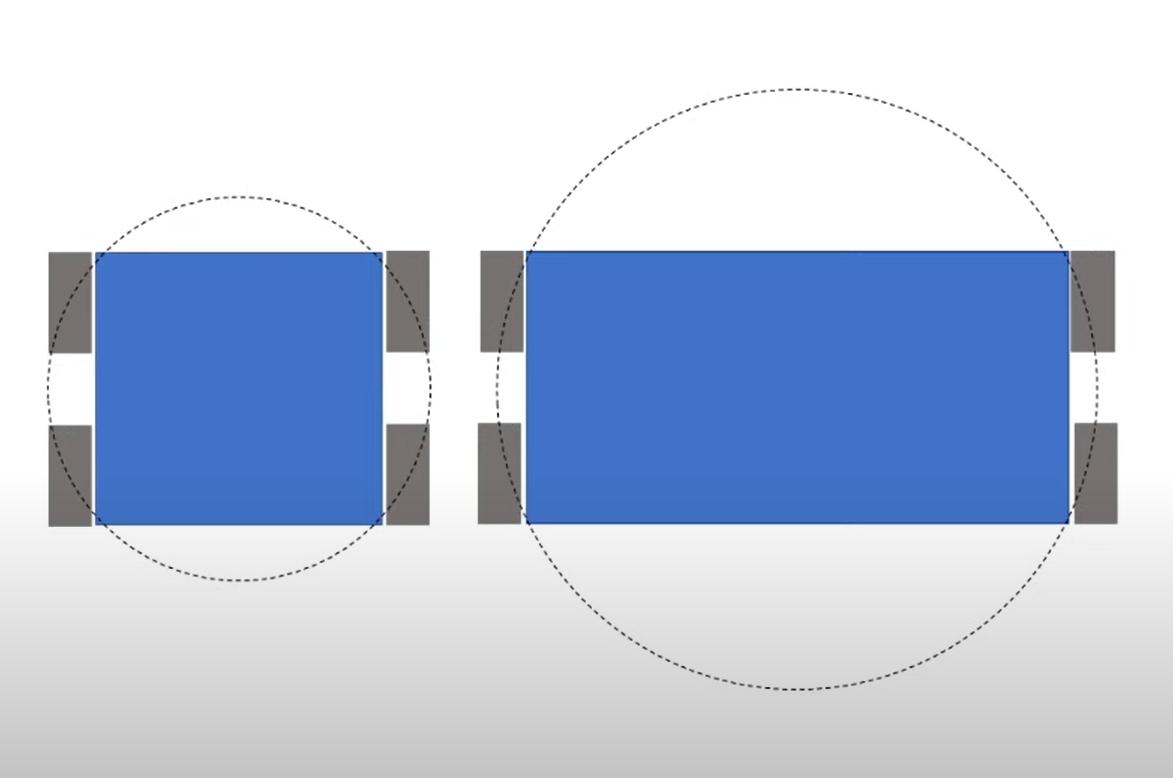
Playing with the track is actually a pretty fun activity in “tuning” parameters. If you think about it, the larger the track, the more the robot needs to spin it’s wheels to turn the desired amount:
So to “tune” the track value (when not using Inertial or Gyro), try the following:
- Place the robot lined up against a maker line that you can use for reference
- Program it to turn 90 degrees
- If the robot turns too far, reduce the track value slightly
- If the robot doesn’t turn far enough, increase the track value
Repeat until the 90 degrees is accurate.
Of course, it is still always more reliable to use a sensor here, so the moral of the story is where possible, always use the Inertial or Gyro sensor for accurate turns!
4 Likes
Thank you for the explanation with pictures! I am sharing with @Andi_Sutphen because she was doing the VEX IQ Square Dance lesson when we first ran into the issue. Your reply clarified everything!
1 Like